関西大学システム理工学部 機械工学科
ロボット・マイクロシステム研究室
タコの吸盤を模倣したロボットハンド
概要
不定形な食品の搬送や多様な形状をハンドリングする物流では、物体に柔軟に対応できるハンドリングシステムが求められます。把持技術の要素であるロボットハンドが高度なセンシングを用いずに様々な物体を把持できれば、柔軟なハンドリングシステムとなると考えています。そこで本研究では、物体に柔軟に対応して把持できる吸着グリッパを開発中です。(お問い合わせはこちらから)
三菱電機システムサービスとの共同開発 MELSCオンライン検査システム(2022)
IREX2022、MEX金沢にて展示
タコの吸盤を模倣した真空グリッパの仕組み
タコは吸盤機構は吸盤と漏斗部とで構成されています。タコは漏斗部の筋肉を使い漏斗部が対象物に張り付きます。次に密閉した空間ができたところで吸盤の筋肉を使い吸盤内部の空間を広げ負圧を発生させます。このようにして外部との大きな差圧により高い吸着力を実現しています。そこで本研究では、薄膜状の吸盤をもつグリッパを提案しました(日本機械学会ロボティクス・メカトロニクス講演会 Robomec2013にて発表 5月23日)。吸盤内部は真空ポンプとつながっており、吸盤内部を減圧できます。吸盤把持対象物に密着させ吸盤内部を減圧すると、大気圧との圧力差により対象物を把持できます。
一般的な真空吸着と異なり吸盤内部の排気系と大気が膜によって遮断されているためリークがありません。したがって吸盤が対象物に接触していなくても、全ての吸盤内部の圧力を下げることができます。これにより凹凸のある対象物を把持できます。さらに吸脱着の制御は1つの真空計と1つのバルブの切り替えだけで済みます。また排気系が大気とつながっていないので、ごみが排気系に詰まることもありません。ハンドをシリコーンゴムなどの柔軟なエラストマで作製することにより、曲面をもつ対象物の把持も可能となります。
ハンドを対象物に接触させると、エラストマ製の薄膜と対象物の間にわずかな空間(吸着部の空間)ができます。吸盤内部の圧力をポンプによって下げると、薄膜が吸盤内部側に凹みます。密閉空間の体積が増えるのでボイル・シャルルの法則より圧力が下がります。ただし薄膜の復元力があるので密閉空間の圧力は吸盤内部の圧力よりわずかに小さくなります。
吸盤型フレキシブルハンドは吸盤にあたる薄膜部分があり、吸盤内部の圧力を下げることで膜が凹みます。ハンドが物体の形状に追従できるようハンドは内部にガラスビーズが充填された柔軟な構造となっています。またガラスビーズが排気流路や吸盤部分に入らないよう,それぞれにフィルタがあります。
<特許登録済>
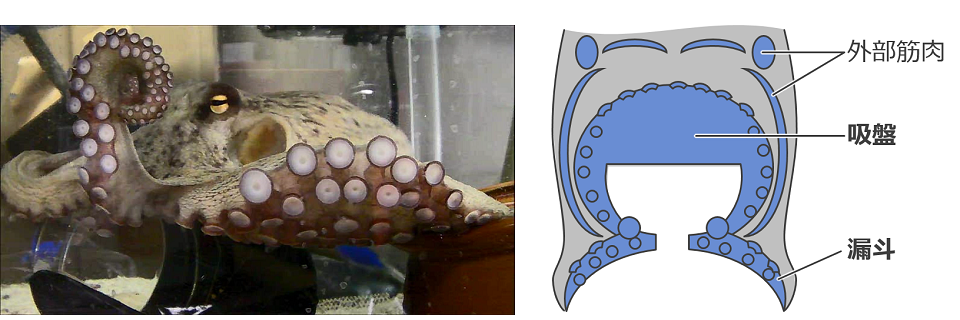
タコの吸盤 [Ref.1: William M. Kier and Andrew M. Smith, Integr. Comp. Biol. 42: 1146-1153, 2002]
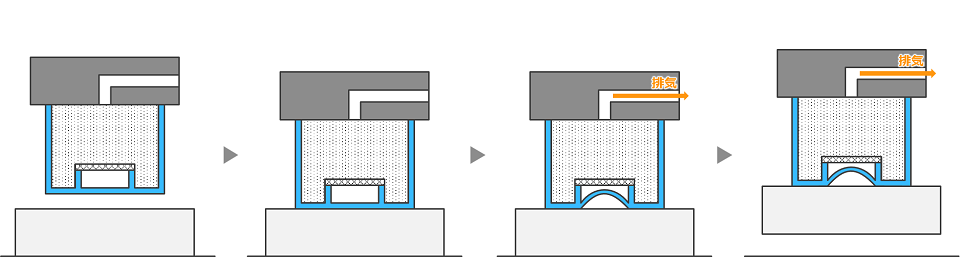
グリッパの基本的な吸着原理
日用品や金属体を搬送する様子 2018年 / Picking various objects by gripper
ロボットアームとタコ模倣型吸着グリッパを使用してパウチ容器などを把持しています。フルスクリーンにしてご覧ください。